
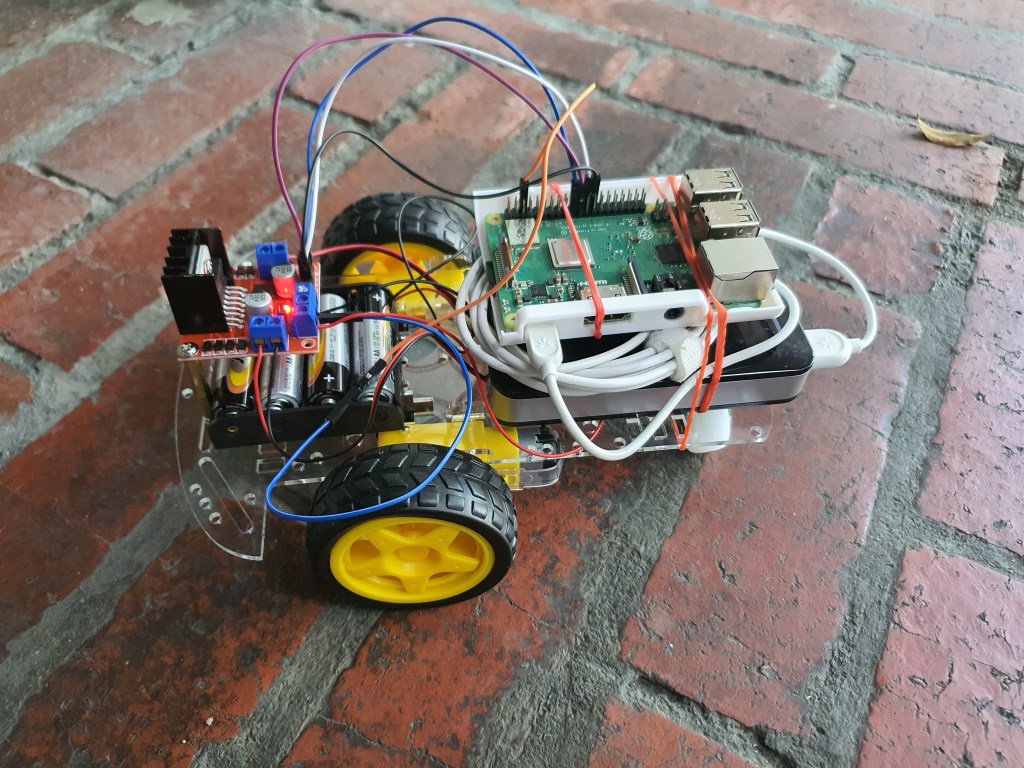
Version ‘alamak’ of the remote control cart (buggy)

There are some limitation using the Python robot library together with this buggy. The right and left function resulted in the buggy doing a spot turn, which in this case is not what I wanted. So in the code you can see that the turn right/left function is use together with forward and sleep function to smoothen the turning.
In Line 39 , the ‘bd.when_moved’ command is commented out because I do not want the Blue Dot remote control to register a long press as a command to sent continuous loops. In this way the RPi will only run one ‘move’ function per one press of the Blue Dot. The next ‘move function will only run when the user finger is lifted and repress the bluedot. This, to me is necessary, so as to have better control on the turning of the buggy.
A video to show the buggy doing donuts around a table leg. ↓
from bluedot import BlueDot
from gpiozero import Robot
from time import sleep
bd = BlueDot()
bd.wait_for_press()
#Just a message to confirm interface
print("You pressed the blue dot!")
#GPIO pins to motors connection
robot = Robot(left=(7, 8), right=(9, 10))
def move(pos):
if pos.top:
robot.forward()
elif pos.bottom:
robot.backward()
elif pos.right: #the right/left turn fn use together
robot.left() #with forward and sleep function
sleep(0.05) #to smoothen the turning
robot.forward(0.8)
sleep(0.1)
elif pos.left:
robot.right()
sleep(0.05)
robot.forward(0.8)
sleep(0.1)
#robot.forward()
#robot.left(0.8)
def stop():
robot.stop()
bd.when_pressed = move
#below when_moved command removed to prevent bluedot continuous
#sending message to Rpi
#bd.when_moved = move
bd.when_released = stop
So the next step is to add a front (and maybe back) camera to the buggy and make it a surveillance buggy. Good thing the range of the bluetooth can be up to 100m.
